Motor DC tersedia
dalam banyak ukuran, namun penggunaannya pada umumnya dibatasi untuk
beberapa penggunaan berkecepatan rendah, penggunaan daya rendah hingga
sedang seperti peralatan mesin dan rolling mills, sebab sering terjadi
masalah dengan perubahan arah arus listrik mekanis pada ukuran yang
lebih besar. Juga, motor tersebut dibatasi hanya untuk penggunaan di
area yang bersih dan tidak berbahaya sebab resiko percikan api pada
sikatnya. Motor DC juga relatif mahal dibanding motor AC.
Perhitungan
Hubungan antara kecepatan, flux medan dan tegangan dinamo ditunjukkan dalam persamaan berikut:
Dimana :
E =gaya elektromagnetik yang dikembangkan pada terminal dinamo (volt)
Φ = flux medan yang berbanding lurus dengan arus medan
N = kecepatan dalam RPM (putaran per menit) T = torque electromagnetik
Ia = arus dinamo
K = konstanta persamaan
Karakteristik Motor DC Shunt
Gambar. Karakteristik Motor DC shunt
Berikut tentang kecepatan motor shunt (E.T.E., 1997):
Kecepatan
pada prakteknya konstan tidak tergantung pada beban (hingga torque
tertentu setelah kecepatannya berkurang, lihat Gambar diatas) dan oleh
karena itu cocok untuk penggunaan komersial dengan beban awal yang
rendah, seperti peralatan mesin.
Kecepatan
dapat dikendalikan dengan cara memasang tahanan dalam susunan
seri dengan dinamo (kecepatan berkurang) atau dengan memasang tahanan
pada arus medan (kecepatan bertambah).
2. Motor AC
Motor
arus bolak-balik menggunakan arus listrik yang membalikkan arahnya
secara teratur pada rentang waktu tertentu. Motor listrik memiliki dua
buah bagian dasar listrik: "stator" dan "rotor" seperti ditunjukkan
dalam Gambar. Stator merupakan komponen listrik statis. Rotor merupakan
komponen listrik berputar untuk memutar as motor.
Keuntungan utama motor DC terhadap motor AC adalah
bahwa kecepatan motor AC lebih sulit dikendalikan. Untuk mengatasi
kerugian ini, motor AC dapat dilengkapi dengan penggerak frekwensi
variabel untuk meningkatkan kendali kecepatan sekaligus menurunkan
dayanya. Motor induksi merupakan motor yang paling populer di industri
karena kehandalannya dan lebih mudah perawatannya. Motor induksi AC
cukup murah (harganya setengah atau kurang dari harga sebuah motor DC)
dan juga memberikan rasio daya terhadap berat yang cukup tinggi (sekitar
dua kali motor DC).
Motor sinkron adalah Motor AC,
bekerja pada kecepatan tetap pada sistim frekwensi tertentu. Motor ini
memerlukan arus searah (DC) untuk pembangkitan daya dan memiliki torque
awal yang rendah, dan oleh karena itu motor sinkron cocok untuk
penggunaan awal dengan beban rendah, seperti kompresor udara, perubahan
frekwensi dan generator motor. Motor sinkron mampu untuk memperbaiki
faktor daya sistim, sehingga sering digunakan pada sistim yang
menggunakan banyak listrik.
Gambar. Motor Sinkron
Komponen utama Motor Sinkron :
Rotor. Perbedaan
utama antara motor sinkron dengan motor induksi adalah bahwa rotor
mesin sinkron berjalan pada kecepatan yang sama dengan perputaran medan
magnet. Hal ini memungkinkan sebab medan magnit rotor tidak lagi
terinduksi. Rotor memiliki magnet permanen atau arus DC-excited, yang
dipaksa untuk mengunci pada posisi tertentu bila dihadapkan dengan medan
magnet lainnya.
ƒStator. Stator menghasilkan medan magnet berputar yang sebanding dengan frekwensi yang dipasok.
Motor ini berputar pada kecepatan sinkron, yang diberikan oleh persamaan berikut (Parekh, 2003):
Dimana :
f = frekwensi dari pasokan frekwensi
P= jumlah kutub
Motor induksi
merupakan motor yang paling umum digunakan pada berbagai peralatan
industri. Popularitasnya karena rancangannya yang sederhana, murah dan
mudah didapat, dan dapat langsung disambungkan ke sumber daya AC
Motor induksi memiliki dua komponen listrik utama :
Rotor, Motor induksi menggunakan dua jenis rotor:
- Rotor kandang
tupai terdiri dari batang penghantar tebal yang dilekatkan dalam
petak-petak slots paralel. Batang-batang tersebut diberi hubungan
pendek pada kedua ujungnya dengan alat cincin hubungan pendek.
- Lingkaran rotor yang memiliki gulungan tiga fase, lapisan ganda dan terdistribusi.
Dibuat
melingkar sebanyak kutub stator. Tiga fase digulungi kawat pada bagian
dalamnya dan ujung yang lainnya dihubungkan ke cincin kecil yang
dipasang pada batang as dengan sikat yang menempel padanya.
ƒ
Stator. Stator
dibuat dari sejumlah stampings dengan slots untuk membawa gulungan
tiga fase. Gulungan ini dilingkarkan untuk sejumlah kutub yang tertentu.
Gulungan diberi spasi geometri sebesar 120 derajat.
Gambar. Motor Induksi
Klasifikasi Motor Induksi
Motor induksi dapat diklasifikasikan menjadi dua kelompok utama (Parekh, 2003):
ƒMotor induksi
satu fase. Motor ini hanya memiliki satu gulungan stator, beroperasi
dengan pasokan daya satu fase, memiliki sebuah rotor kandang tupai, dan
memerlukan sebuah alat untuk menghidupkan motornya. Sejauh ini motor ini
merupakan jenis motor yang paling umum digunakan dalam peralatan rumah
tangga, seperti fan angin, mesin cuci dan pengering pakaian, dan untuk
penggunaan hingga 3 sampai 4 Hp.
ƒMotor induksi
tiga fase. Medan magnet yang berputar dihasilkan oleh pasokan tiga fase
yang seimbang. Motor tersebut memiliki kemampuan daya yang tinggi,
dapat memiliki kandang tupai atau gulungan rotor (walaupun 90% memiliki
rotor kandang tupai); dan penyalaan sendiri. Diperkirakan bahwa sekitar
70% motor di industri menggunakan jenis ini, sebagai contoh, pompa,
kompresor, belt conveyor, jaringan listrik dan grinder. Tersedia dalam
ukuran 1/3 hingga ratusan Hp.
Kecepatan Motor Induksi
Motor induksi
bekerja sebagai berikut. Listrik dipasok ke stator yang akan
menghasilkan medan magnet. Medan magnet ini bergerak dengan kecepatan
sinkron disekitar rotor. Arus rotor menghasilkan medan magnet kedua,
yang berusaha untuk melawan medan magnet stator, yang menyebabkan rotor
berputar.
Walaupun
begitu, didalam prakteknya motor tidak pernah bekerja pada kecepatan
sinkron namun pada “kecepatan dasar” yang lebih rendah. Terjadinya
perbedaan antara dua kecepatan tersebut disebabkan adanya “slip/geseran”
yang meningkat dengan meningkatnya beban. Slip hanya terjadi pada motor
induksi. Untuk menghindari slip dapat dipasang sebuah cincin geser/
slip ring, dan motor tersebut dinamakan “motor cincin geser/
slip ring motor”.
Persamaan berikut dapat digunakan untuk menghitung persentase slip/geseran (Parekh, 2003):
Dimana :
Ns = kecepatan sinkron dalam RPM
Nb = kecepatan dasar dalam RPM
Hubungan antara beban, kecepatan dan torque
Gambar dibawah
ini menunjukan grafik torque-kecepatan motor induksi AC tiga fase dengan
arus yang sudah ditetapkan. Bila motor (Parekh, 2003):
ƒ- Mulai menyala ternyata terdapat arus nyala awal yang tinggi dan torque yang rendah (“pull-up torque”).
ƒ- Mencapai 80% kecepatan penuh, torque berada pada tingkat tertinggi (“pull-out torque”) dan arus mulai turun.
- Pada kecepatan penuh, atau kecepatan sinkron, arus torque dan stator turun ke nol.
Gambar. Grafik Torque-Kecepatan Motor Induksi AC
3-Fase (Parekh, 2003)
sumber:http://elektronika-dasar.web.id/teori-elektronika/jenis-jenis-motor-listrik/


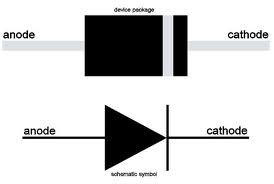 Sifat dioda :
• kalau diberi arah maju (tegangan positif => anoda dan tegangan negatif => katoda) akan menghantarkan arus dan sebaliknya,
Sifat dioda :
• kalau diberi arah maju (tegangan positif => anoda dan tegangan negatif => katoda) akan menghantarkan arus dan sebaliknya,
 • kalau diberi arah mundur (tegangan positif => katoda dan tegangan negatif => anoda) tidak akan menghantarkan arus.
• kalau diberi arah mundur (tegangan positif => katoda dan tegangan negatif => anoda) tidak akan menghantarkan arus.
 Fungsi Dioda :
• Sebagai penyearah
• Sebagai pengaman rangkaian dari kemungkinan terbaliknya polaritas
Mengukur Dioda Dengan Multitester
Putar batas ukur pada Ohmmeter X10 / X100
Fungsi Dioda :
• Sebagai penyearah
• Sebagai pengaman rangkaian dari kemungkinan terbaliknya polaritas
Mengukur Dioda Dengan Multitester
Putar batas ukur pada Ohmmeter X10 / X100
 1. probe merah => katoda, probe hitam => anoda => Jarum bergerak bukan nol.
kemudian posisi dibalik :
probe merah => anoda, probe hitam => katoda, Jarum tdk bergerak
berarti dioda dalam kondisi BAIK.
2. probe merah => katoda, probe hitam => anoda => Jarum bergerak atau menunjuk nol.
kemudian posisi dibalik :
probe merah => anoda, probe hitam => katoda => Jarum bergerak atau menunjuk nol
berarti dioda dalam kondisi RUSAK / SHORT.
4. DIODA ZENER
Terbuat dari bahan silikon. Biasanya digunakan pada rangkaian power supply dimana fungsinya adalah sebagai penstabil arus. Meskipun arus AC yang dirubah ke DC berubah-ubah, tidak akan berpengaruh jika terdapat dioda zener ini.
Adapun sifatnya adalah sebagai berikut :
• Tegangan yang dicapai maksimal rata-rata 0,7 s/d 12 volt
• Hanya tahan terhadap arus kecil, maksimal 1 s/d 50 mA
• Hampir tidak ada tegangan yang hilang jika sudah melewati dioda zener.
Contoh dioda zener : zener 6 volt, zener 12 volt, dll
1. probe merah => katoda, probe hitam => anoda => Jarum bergerak bukan nol.
kemudian posisi dibalik :
probe merah => anoda, probe hitam => katoda, Jarum tdk bergerak
berarti dioda dalam kondisi BAIK.
2. probe merah => katoda, probe hitam => anoda => Jarum bergerak atau menunjuk nol.
kemudian posisi dibalik :
probe merah => anoda, probe hitam => katoda => Jarum bergerak atau menunjuk nol
berarti dioda dalam kondisi RUSAK / SHORT.
4. DIODA ZENER
Terbuat dari bahan silikon. Biasanya digunakan pada rangkaian power supply dimana fungsinya adalah sebagai penstabil arus. Meskipun arus AC yang dirubah ke DC berubah-ubah, tidak akan berpengaruh jika terdapat dioda zener ini.
Adapun sifatnya adalah sebagai berikut :
• Tegangan yang dicapai maksimal rata-rata 0,7 s/d 12 volt
• Hanya tahan terhadap arus kecil, maksimal 1 s/d 50 mA
• Hampir tidak ada tegangan yang hilang jika sudah melewati dioda zener.
Contoh dioda zener : zener 6 volt, zener 12 volt, dll
 Pengukuran baik tidaknya dioda zener sama dengan pengukuran dioda biasa.
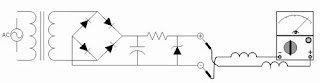
Aplikasi dalam rangkaian :
Pengukuran baik tidaknya dioda zener sama dengan pengukuran dioda biasa.
Aplikasi dalam rangkaian :
 Semoga artikel Mengenal Komponen Dioda danMengetahui kondisinya ini bermanfaat.
Semoga artikel Mengenal Komponen Dioda danMengetahui kondisinya ini bermanfaat.
























